软件介绍
最新版本的MulloCo全名称为Multi-Joint dynamics with Contact,是一款由Emo制造的 Todorov是为智能机器人、运动生理学和人工智能开发设计的通用多体动力学模型游戏引擎模拟软件。相关客户可以快速构建从传统倒立到复杂的仿生机器人或骨骼肌系统,也可以模拟真实触摸动力学模型的实际效果,给用户带来相当好的使用体验。本文将带你探索如何在MuJoCo中从零实现类似Velcro(魔术贴)的粘附效果,通过微观力学模拟技术构建具有真实物理特性的粘附系统。
支持根据解析方法测算动力学模型导数,这对根据梯度方向的轨迹提升(Trajectory Optimization)和自适应控制尤为重要。
【丰富多样的控制器实体模型】
提供部位、速率、扭矩及其特殊电机特征的多种多样控制器,可以直接相匹配现实生活中各种各样电机控制或液压机硬件配置。
【全维度数据可视化3D渲染】
内嵌根据 OpenGL 的高效3d渲染器,提供高质量深度图输出视觉检测系统作用,支持视觉导航算法开发设计。
【彻底开源与混合开发】
由 Google DeepMind 全方位开源,支持 Windows、macOS 和 Linux,并提供原生的 Python 关联,绿色生态集成化极为便捷。
MulloCo使用教程
1、本站下载好压缩文件解压后,你会在文件夹内看到 bin、include、model 等文件夹。
2、进入 bin 目录。
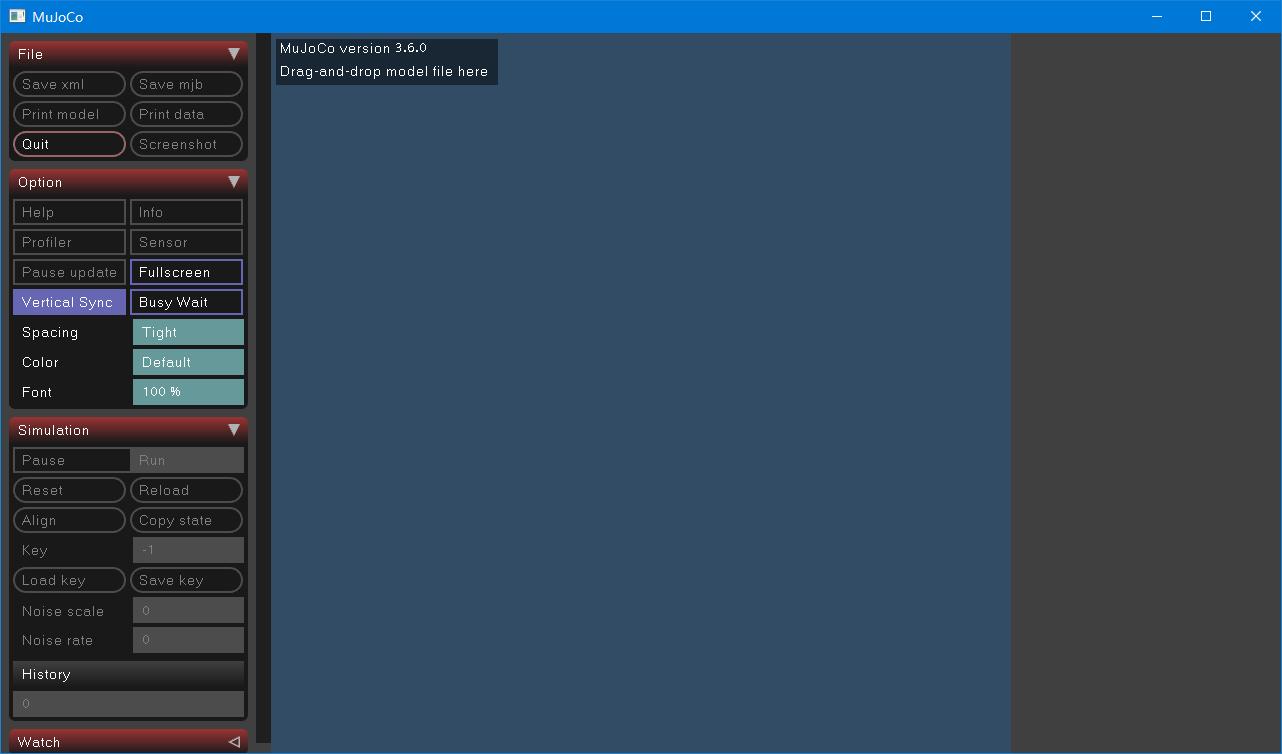
3、双击运行 simulate.exe(这是 MuJoCo 自带的可视化仿真器)。
4、你可以直接将 model 文件夹里的任何 .xml 文件(如 humanoid.xml)拖入 simulate.exe 的窗口中。
5、如果你能看到一个机器人模型并能用鼠标拖动它,说明软件已正常运行了
MulloCo特色
【内设分析导数】支持根据解析方法测算动力学模型导数,这对根据梯度方向的轨迹提升(Trajectory Optimization)和自适应控制尤为重要。
【丰富多样的控制器实体模型】
提供部位、速率、扭矩及其特殊电机特征的多种多样控制器,可以直接相匹配现实生活中各种各样电机控制或液压机硬件配置。
【全维度数据可视化3D渲染】
内嵌根据 OpenGL 的高效3d渲染器,提供高质量深度图输出视觉检测系统作用,支持视觉导航算法开发设计。
【彻底开源与混合开发】
由 Google DeepMind 全方位开源,支持 Windows、macOS 和 Linux,并提供原生的 Python 关联,绿色生态集成化极为便捷。
-
 11.94M 简体中文 2026-04-09
11.94M 简体中文 2026-04-09
相关文章